様々なリンク系の形態
リンク系の動力学方程式は,一般的にはニュートン・オイラー法やラグランジュ法などにより導出される.その際,開ループ系のみの場合には厳密な方程式が簡単に導出されるが,系内に閉ループ系が形成された途端にその導出は困難となり,様々な工夫が必要となる.これは,リンク系の動力学方程式が相対的な回転座標系に基づいており,そのため系が閉じた瞬間にリンク間の情報のやり取りができなくなるからである.また,柔軟リンク系では部材のたわみを考慮する必要があるため,動力学方程式の導出はさらに困難となる.さらに,下図のような開・閉ループ系が交互に発生するシステムや柔軟リンク系で逆動力学をフィードフォワード的に考慮した制御が必要となることが予想される.この場合には,制御の安定性を維持するために,動力学方程式(またはアルゴリズム)の切換えを極力無くすことが重要となる.
様々なリンク系の形態
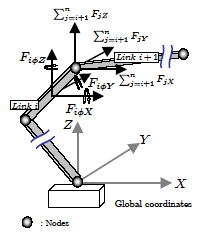
リンク系に作用する節点力
フィードフォワード制御実験用に製作した実機
HOMEへ![]() TOPへ
TOPへ![]()
D. Isobe: Unified Solution Scheme for Inverse Dynamics of Robotic Systems, Progress in Autonomous Robot Research (Editor: F.N. Mortensen), Nova Science Publishers, ISBN:978-1-60456-281-1, pp.125-173, 2008. NOVA
D. Isobe: A Torque Cancelling System for Quick-Motion Robots, Intelligent Mechatronics (Editor: Ganesh Naik), InTech, ISBN:978-953-307-300-2, pp. 21-40, 2011. Open Access
磯部大吾郎,はり要素で解く構造動力学:建物の崩壊解析からロボット機構の制御まで Fortran90・C++ソースコード付,丸善出版,ISBN:978-4-621-30544-7, 2020. Maruzen Amazon
磯部大吾郎, 竹内 裕喜,上田 健夫: 超冗長マニピュレータの関節トルク算出法 -FEMを用いた理論の展開-, 日本計算工学会論文集, 2000巻 p.20000008, (2000). Online
磯部大吾郎: 有限要素法を用いたリンク機構の逆動力学計算, 日本ロボット学会誌, Vol.20, No.6, (2002), pp.647-653. DOI: 10.7210/jrsj.20.647
D. Isobe, D. Imaizumi, Y. Chikugo and S. Sato: A Parallel Solution Scheme for Inverse Dynamics and Its Application in Feed-forward Control of Link Mechanisms, Journal of Robotics and Mechatronics, Vol.15, No.1, (2003), pp.1-7. DOI: 10.20965/jrm.2003.p0001
D. Isobe, D. Imaizumi and A. Yagi: A Parallel Solution Scheme for Inverse Dynamics of Link Mechanisms, JSME International Journal Series C, Vol.46, No.2, (2003), pp.766-771. DOI: 10.1299/jsmec.46.766
磯部大吾郎, 今泉 大作: リンク系の部材剛性に依存しない統一的逆動力学計算法, 日本機械学会論文集 (C編), 第70巻, 第691号, (2004), pp.728-735. DOI: 10.1299/kikaic.70.728
D. Isobe: A Unified Solution Scheme for Inverse Dynamics, Advanced Robotics, Vol.18, No.9, (2004), pp.859-880. DOI: 10.1163/1568553042225778
D. Isobe, A. Yagi and S. Sato: General-Purpose Expression of Structural Connectivity in the Parallel Solution Scheme and Its Application, JSME International Journal Series C, Vol.49, No.3, (2006), pp.789-798. DOI: 10.1299/jsmec.49.789
磯部大吾郎,加藤 昭博: フレキシブル・リンク系のモデルベースド・フィードフォワード制御, 日本ロボット学会誌, Vol.25, No.4, (2007), pp.625-631. DOI: 10.7210/jrsj.25.625
D. Isobe and A. Kato: Feedforward Control of Flexible Link Systems using Parallel Solution Scheme, International Journal of Robotics and Automation, Vol.23, No.1, (2008), pp.31-39. DOI: 10.2316/Journal.206.2008.1.206-3047
磯部 大吾郎, 松井 康将, 近藤 健介: 並列的逆動力学計算法を用いたトルクキャンセリングシステムの開発, 日本機械学会論文集C編, Vol. 77, No. 775, (2011), pp.785-798. DOI: 10.1299/kikaic.77.785
磯部 大吾郎, 北村 悠人: 並列的逆動力学計算法を用いた劣駆動リンク系の動力学補償, 日本機械学会論文集C編, Vol. 77, No. 775, (2011), pp.799-812. DOI: 10.1299/kikaic.77.799
D. Isobe, B. Nakayama and K. Kondo: A Torque-Canceling System Using the Inverse Dynamics Parallel Solution Scheme, Advanced Robotics, Vol.28, No.2, (2014), pp.119-132. DOI: 10.1080/01691864.2013.857277
磯部 大吾郎, 竹内 裕喜, 上田 健夫: FEMによるマニピュレータの並列制御法, 計算工学講演会論文集, 第4巻, 第2号, (1999), pp.917-920. abstract
磯部大吾郎, 竹内 裕喜, 上田 健夫: FEMによるリンク機構の制御, 日本機械学会ロボティクス・メカトロニクス講演会'99講演論文集CD-ROM, No.99-9, (1999). abstract
磯部大吾郎, 竹内 裕喜, 上田 健夫: 有限要素によるリンク機構のモデル化(その1,超冗長マニピュレータへの適用), 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集CD-ROM, No.00-2, (2000). abstract
D.Isobe, H.Takeuchi and T.Ueda: A Finite-Element Approach to Control Link Mechanisms: Its Concept and Basic Simulation, Proceedings of the International Conference on Computational Engineering Science 2000 -Advances in Computational Engineering and Sciences-, Vol.2, (2000), pp.1648-1653, Los Angeles, USA. abstract
今泉 大作,磯部大吾郎: 3次元運動をする開リンク機構の有限要素法を用いた逆動力学計算, 計算工学講演会論文集, 第6巻, 第2号, (2001), pp.799-802. abstract
磯部大吾郎: 有限要素法を用いた閉リンク機構の逆動力学計算, 計算工学講演会論文集, 第6巻, 第2号, (2001), pp.803-806. abstract
今泉 大作,磯部大吾郎: 有限要素によるリンク機構のモデル化(その2,3次元運動をする開リンク機構への適用), 日本機械学会ロボティクス・メカトロニクス講演会'01講演論文集CD-ROM, No.01-4, (2001). abstract
磯部大吾郎: 有限要素によるリンク機構のモデル化(その3,閉リンク機構への適用), 日本機械学会ロボティクス・メカトロニクス講演会'01講演論文集CD-ROM, No.01-4, (2001). abstract
磯部大吾郎: 機構形態に依存しない逆動力学計算法, 第19回日本ロボット学会学術講演会論文集CD-ROM, (2001), pp.895-896. abstract
D.Isobe: Deriving Inverse Dynamics of Open/Closed Loop Mechanisms: A Unified Approach Using Finite Element Method, Proceedings of the First Asian-Pacific Congress on Computational Mechanics, (2001), Sydney, Australia. abstract
D.Isobe: A Unified Numerical Scheme for Calculating Inverse Dynamics of Open/Closed Link Mechanisms, Proceedings of the 27th Annual Conference of the IEEE Industrial Electronics Society IECON'01, (2001), pp.341-344, Denver, USA. abstract
八木 淳,磯部大吾郎: 有限要素法を用いた閉リンク機構の逆動力学計算(系内のエネルギ消費量の検証), 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集CD-ROM, No.02-6, (2002). abstract
筑後 陽一,佐藤 俊介,磯部大吾郎: 有限要素法を用いた逆動力学計算によるリンク機構の制御実験, 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集CD-ROM, No.02-6, (2002). abstract
D.Isobe: A Finite Element Scheme for Calculating Inverse Dynamics of Link Mechanisms, Abstracts of the 5th World Congress on Computational Mechanics, (2002), pp.II-658, Vienna, Austria. abstract
磯部大吾郎,今泉 大作,筑後 陽一,佐藤 俊介: 並列的逆動力学計算法によるリンク機構のフィードフォワード制御, 第20回日本ロボット学会学術講演会論文集CD-ROM, (2002). abstract
今泉 大作,磯部大吾郎: 有限要素法を用いたフレキシブルマニピュレータの運動学・逆動力学計算, 計算工学講演会論文集, 第8巻, 第1号, (2003), pp.489-492. abstract
磯部大吾郎,今泉 大作: 並列的解法によるフレキシブルマニピュレータの逆動力学計算, 日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集CD-ROM, No.03-4, (2003). abstract
磯部大吾郎,筑後 陽一,今泉 大作,佐藤 俊介: 並列的解法を用いた可変形態リンク系のフィードフォワード制御, 日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集CD-ROM, No.03-4, (2003). abstract
D.Isobe and D.Imaizumi: A Parallel Solution Scheme of Inverse Dynamics for Flexible Manipulators, Proceedings of the 9th IASTED International Conference on Robotics and Applications, (2003), pp.106-111, Salzburg, Austria. abstract
磯部大吾郎, 今泉 大作,筑後 陽一: リンク機構の並列的逆動力学計算法の開発(統一的手法の構築を目指して), 日本機械学会2003年度年次大会講演論文集, No.03-1, Vol.1, (2003), pp.37-38. abstract
八木 淳,磯部大吾郎: 並列的解法を用いた枝分かれリンク系の逆動力学計算, 第21回日本ロボット学会学術講演会論文集CD-ROM, (2003). abstract
佐藤 俊介,磯部大吾郎: 並列的逆動力学計算法によるリンク機構の力制御, 第21回日本ロボット学会学術講演会論文集CD-ROM, (2003). abstract
D.Isobe, Y.Chikugo, D.Imaizumi, S.Sato and A.Yagi: Feed-Forward Control of Link Mechanisms under Various Boundary Conditions by Using a Parallel Solution Scheme, Proceedings on 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), (2003), pp.2773-2778, Las Vegas, USA. abstract
磯部大吾郎,佐藤 俊介,八木 淳: 汎用を目的とした逆動力学計算法の開発, 第9回ロボティクスシンポジア予稿集, (2004), pp.51-57. abstract
加藤 昭博,磯部大吾郎: 有限要素法によるフレキシブルマニピュレータの軌道計算, 計算工学講演会論文集, 第9巻, 第2号, (2004), pp.733-736. abstract
D.Isobe and S.Sato: Force Control of Link Systems Using the Parallel Solution Scheme, Proceedings of the 10th IASTED International Conference on Robotics and Applications, (2004), pp.239-244, Hawaii, USA. abstract
加藤 昭博,磯部大吾郎: 並列的解法によるフレキシブルマニピュレータの逆動力学計算, 第22回日本ロボット学会学術講演会論文集CD-ROM, (2004). abstract
D.Isobe and A.Yagi: General-Purpose Expression of Structural Connectivity in the Parallel Solution Scheme of Inverse Dynamics, Proceedings on 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), (2004), pp.3513-3518, Sendai, Japan. abstract
磯部大吾郎: 超多自由度系の制御に向けた並列的解法の活用, 第5回計測自動制御学会システムインテグレーション部門学術講演会(SI2004)論文集, (2004),pp.432-433. abstract
加藤 昭博,磯部大吾郎: 並列的解法によるフレキシブルマニピュレータの制振について, 第23回日本ロボット学会学術講演会論文集CD-ROM, (2005). abstract
加藤 昭博,磯部大吾郎: 並列的解法によるフレキシブルマニピュレータのフィードフォワード制御, 日本機械学会第18回計算力学講演会講演論文集, No.05-2, (2005), pp.717-718. abstract
加藤 昭博,磯部大吾郎: 並列的逆動力学計算法を用いた多関節柔軟リンク系の制御, 日本機械学会ロボティクス・メカトロニクス講演会'06講演論文集CD-ROM, No.06-4, (2006). abstract
山中 浩司,加藤 昭博,磯部大吾郎: 柔軟リンク系のモデルベースド・フィードフォワード制御, 日本機械学会第19回計算力学講演会講演論文集, No.06-9, (2006), pp.235-236. abstract
山中 浩司,上田 浩正,磯部大吾郎: 並列的解法を用いたロボット機構のフィードフォワード制御, 日本機械学会ロボティクス・メカトロニクス講演会'07講演論文集CD-ROM, No.07-2, (2007). abstract
D. Isobe and K. Yamanaka: Development of a Unified Feed-Forward Control System for Robotic Mechanisms using Finite Element Approach, CD-ROM Proceedings of APCOM'07-EPMESC XI, (2007), Kyoto, Japan. abstract
北村 悠人,山中 浩司,磯部大吾郎: 並列的解法による劣駆動リンク系の逆動力学計算, 日本機械学会ロボティクス・メカトロニクス講演会'08講演論文集CD-ROM, No.08-4, (2008). abstract
園田 隆,石井 和男,磯部大吾郎: 重心ヤコビアンを用いた閉リンク機構の逆動力学計算, 日本機械学会ロボティクス・メカトロニクス講演会'08講演論文集CD-ROM, No.08-4, (2008). abstract
T. Sonoda, K. Ishii and D. Isobe: Dynamics Computation of Link Mechanisms Employing COG Jacobian, Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, (2008), Xi'an, China. abstract
北村 悠人,磯部大吾郎: 弾性たわみを考慮した劣駆動リンク系の逆動力学計算, 第26回日本ロボット学会学術講演会論文集CD-ROM, (2008). abstract
上田浩正,磯部大吾郎: 構造可変型多肢マニピュレータのフィードフォワード制御, 第26回日本ロボット学会学術講演会論文集CD-ROM, (2008). abstract
園田 隆,石井 和男,磯部大吾郎: 重心ヤコビアンを用いたリンク機構の動力学計算, 第26回日本ロボット学会学術講演会論文集CD-ROM, (2008). abstract
T. Sonoda, K. Ishii and D. Isobe: Unified Dynamics Calculation employing COG Jacobian for Link Mechanisms, Proceedings of Joint 4th International Conference on Soft Computing and Intelligent Systems and 9th International Symposium on Advanced Intelligent Systems (SCIS & ISIS 2008), (2008), Nagoya, Japan. abstract
D. Isobe, K. Yamanaka and Y. Kitamura: Inverse Dynamics Calculation of Underactuated Link Systems Using Parallel Solution Scheme, Proceedings of the 34th Annual Conference of the IEEE Industrial Electronics Society IECON'08, (2008), pp.1632-1637, Orlando, Florida, USA. abstract
上田 浩正,磯部大吾郎: リンク系に対する汎用的フィードフォワード制御システムの開発, 日本機械学会ロボティクス・メカトロニクス講演会'09講演論文集CD-ROM, No.09-4, (2009). abstract
早川 純矢,磯部大吾郎: 並列的解法を用いた移動ロボットのフィードフォワード制御, 日本機械学会ロボティクス・メカトロニクス講演会'09講演論文集CD-ROM, No.09-4, (2009). abstract
松井 康将,磯部大吾郎: 力学的動揺を安定化させるトルクキャンセリングシステムの提案, 日本機械学会ロボティクス・メカトロニクス講演会'09講演論文集CD-ROM, No.09-4, (2009). abstract
北村 悠人,磯部大吾郎: 並列的解法を用いた2関節劣駆動リンク系のフィードフォワード制御, 第27回日本ロボット学会学術講演会論文集CD-ROM, (2009). abstract
松井 康将,近藤 健介,磯部大吾郎: 並列的解法を用いたトルクキャンセリングシステムの提案, 第15回ロボティクスシンポジア予稿集, (2010), pp.226-231. abstract
松井 康将, 近藤 健介, 磯部大吾郎: 柔軟リンク系に対するTCSを用いた動揺抑制実験, 第28回日本ロボット学会学術講演会論文集CD-ROM, (2010). abstract
D. Isobe, Y. Matsui and K. Kondo: A Torque Cancelling System Using the Parallel Solution Scheme, CD-ROM Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA2011), (2011), pp.1064-1070, Shanghai, China. abstract
磯部大吾郎,中山 文平,近藤 健介: トルクキャンセリングシステムを用いた歩行ロボットの動揺抑制, 日本機械学会ロボティクス・メカトロニクス講演会'12講演論文集CD-ROM, No.12-3, (2012). abstract
朱 栄麟,磯部大吾郎: 並列的解法を用いた直動リンクを有するロボット機構の逆動力学計算, 日本機械学会ロボティクス・メカトロニクス講演会'13講演論文集CD-ROM, No.13-2, (2013). abstract
今井 勇佑,磯部大吾郎:柔軟リンク系の振動・動揺抑制, 日本機械学会ロボティクス・メカトロニクス講演会'13講演論文集CD-ROM, No.13-2, (2013). abstract
藤井 浩平,磯部大吾郎:柔軟リンク系の弾性変形を補償する動作計画手法の開発, 日本機械学会ロボティクス・メカトロニクス講演会'13講演論文集CD-ROM, No.13-2, (2013). abstract
福留 光紀,磯部大吾郎: 有限要素法を用いた動力学シミュレータの開発, 日本機械学会ロボティクス・メカトロニクス講演会'14講演論文集CD-ROM, No.14-2, (2014). abstract
杜 偉,磯部大吾郎 :トルクキャンセリングシステムを用いた遊戯用小型ロボットの動揺抑制, 日本機械学会ロボティクス・メカトロニクス講演会'14講演論文集CD-ROM, No.14-2, (2014). abstract
D. Isobe:
HOMEへ![]() TOPへ
TOPへ![]()