Various types of links
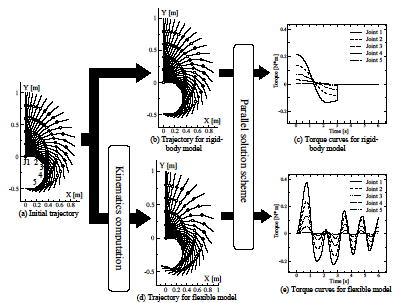
Dynamic equations conducted by generally used schemes, such as the Newton-Euler method or the Lagrangian method, include interdependent variables between the constituting links, since they are evaluated in relative polar coordinates and in dimension of torque. Accordingly, it will become highly complicated to derive inverse dynamics of the closed-loop link mechanisms, or of continuously transforming link mechanisms. In contrast, the parallel solution scheme, developed by the Finite Element Method (FEM), evaluates the analyzed model in absolute Cartesian coordinates with the equation of motion expressed in dimension of force. By taking advantage of the natural features of the FEM, i.e., the capability to express the behavior of each discrete element as well as that of the entire continuous system, local information such as nodal forces and displacements can be calculated in parallel. The nodal forces are calculated incrementally in a matrix form, which does not require any revision of the overall frame, and the local variables can be revised by simply changing the input data in the case of a physical change in the hardware system. The calculated nodal forces are then converted into joint torques using a matrix form equation divided into terms of force, transformation between coordinates, and length. The structure of the algorithm makes it seamless in application to different types of link mechanisms under various boundary conditions such as open- or closed-loop link mechanism. The scheme can be applied to such circumstances where robotic tasks include motions that generate open and closed loops alternately.
Various types of links
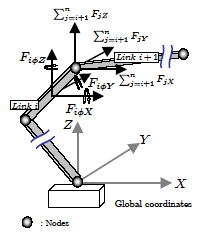
Nodal forces acting on i th link in n-link system
Manipulators used for feed-forward control experiments
to HOME![]() to TOP
to TOP![]()
Related papers (Books):
D. Isobe: Unified Solution Scheme for Inverse Dynamics of Robotic Systems, Progress in Autonomous Robot Research (Editor: F.N. Mortensen), Nova Science Publishers, ISBN:978-1-60456-281-1, pp.125-173, 2008. NOVA
D. Isobe: A Torque Cancelling System for Quick-Motion Robots, Intelligent Mechatronics (Editor: Ganesh Naik), InTech, ISBN:978-953-307-300-2, pp. 21-40, 2011. Open Access
D. Isobe, Solving problems in structural dynamics using beam elements: From collapse behaviors of buildings to torque cancelling of robots, Maruzen, ISBN:978-4-621-30544-7, 2020. Maruzen Amazon
Related papers (Journals):
D. Isobe, H. Takeuchi and T. Ueda: A Numerical Scheme for Calculating Joint Torque of Hyper-Redundant Manipulators -An Approach Using FEM-, Transactions of JSCES, Vol. 2000, p.20000008, (2000), in Japanese. Online
D.Isobe: Deriving Inverse Dynamics for Link Mechanisms by Using Finite Element Method, Journal of the Robotics Society of Japan, Vol.20, No.6, (2002), pp.647-653, in Japanese. DOI: 10.7210/jrsj.20.647
D.Isobe, D.Imaizumi, Y.Chikugo and S.Sato: A Parallel Solution Scheme for Inverse Dynamics and Its Application in Feed-forward Control of Link Mechanisms, Journal of Robotics and Mechatronics, Vol.15, No.1, (2003), pp.1-7. DOI: 10.20965/jrm.2003.p0001
D.Isobe, D.Imaizumi and A.Yagi: A Parallel Solution Scheme for Inverse Dynamics of Link Mechanisms, JSME International Journal Series C, Vol.46, No.2, (2003), pp.766-771. DOI: 10.1299/jsmec.46.766
D.Isobe and D.Imaizumi: A Unified Solution Scheme for Calculating Inverse Dynamics Independent to Member Stiffness of Link Systems, Transactions of the Japan Society of Mechanical Engineers, Series C, Vol.70, No.691, (2004), pp.728-735, in Japanese. DOI: 10.1299/kikaic.70.728
D.Isobe: A Unified Solution Scheme for Inverse Dynamics, Advanced Robotics, Vol.18, No.9, (2004), pp.859-880. DOI: 10.1163/1568553042225778
D. Isobe, A. Yagi and S. Sato: General-Purpose Expression of Structural Connectivity in the Parallel Solution Scheme and Its Application, JSME International Journal Series C, Vol.49, No.3, (2006), pp.789-798. DOI: 10.1299/jsmec.49.789
D. Isobe and A. Kato: Model-based Feed-forward Control of Flexible Link Systems, Journal of the Robotics Society of Japan, Vol.25, No.4, (2007), pp.625-631, in Japanese. DOI: 10.7210/jrsj.25.625
D. Isobe and A. Kato: Feedforward Control of Flexible Link Systems using Parallel Solution Scheme, International Journal of Robotics and Automation, Vol.23, No.1, (2008), pp.31-39. DOI: 10.2316/Journal.206.2008.1.206-3047
D. Isobe, Y. Matsui and K. Kondo: Development of a Torque Cancelling System Using Parallel Solution Scheme, Transactions of the Japan Society of Mechanical Engineers, Series C, Vol. 77, No. 775, (2011), pp.785-798, in Japanese. DOI: 10.1299/kikaic.77.785
D. Isobe and Y. Kitamura: Dynamics Compensation of Underactuated Link Systems Using Parallel Solution Scheme, Transactions of the Japan Society of Mechanical Engineers, Series C, Vol. 77, No. 775, (2011), pp.799-812, in Japanese. DOI: 10.1299/kikaic.77.799
D. Isobe, B. Nakayama and K. Kondo: A Torque-Canceling System Using the Inverse Dynamics Parallel Solution Scheme, Advanced Robotics, Vol.28, No.2, (2014), pp.119-132. DOI: 10.1080/01691864.2013.857277
Related papers (Proceedings):
D.Isobe, H.Takeuchi and T.Ueda: Parallel Control Method for Manipulators by Using FEM, Proceedings of the Conference on Computational Engineering and Science, Vol.4, No.2, (1999), pp.917-920, in Japanese. abstract
D.Isobe, H.Takeuchi and T.Ueda: Control of Link Mechanism by Using FEM, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '99, No.99-9, (1999), in Japanese. abstract
D.Isobe, H.Takeuchi and T.Ueda: Finite Element Modeling of Link Mechanisms (Part1, Application to Hyper-Redundant Manipulators), CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '00, No.00-2, (2000), in Japanese. abstract
D.Isobe, H.Takeuchi and T.Ueda: A Finite-Element Approach to Control Link Mechanisms: Its Concept and Basic Simulation, Proceedings of the International Conference on Computational Engineering Science 2000 -Advances in Computational Engineering and Sciences-, Vol.2, (2000), pp.1648-1653, Los Angeles, USA. abstract
D.Imaizumi and D.Isobe: Calculation of Inverse Dynamics Using FEM for Open-Loop Link Mechanisms in 3-D Motion, Proceedings of the Conference on Computational Engineering and Science, Vol.6, No.2, (2001), pp.799-802, in Japanese. abstract
D.Isobe: Calculation of Inverse Dynamics for Closed-Loop Link Mechanisms Using FEM, Proceedings of the Conference on Computational Engineering and Science, Vol.6, No.2, (2001), pp.803-806, in Japanese. abstract
D.Imaizumi and D.Isobe: Finite Element Modeling of Link Mechanisms (Part 2, Application to Open-Loop Link Mechanisms in 3-D Motion), CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '01, No.01-4, (2001), in Japanese. abstract
D.Isobe: Finite Element Modeling of Link Mechanisms (Part 3, Application to Closed-Loop Link Mechanisms), CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '01, No.01-4, (2001), in Japanese. abstract
D.Isobe: A Calculation Scheme of Inverse Dynamics Independent to System Configuration, CD-ROM Proceedings of the 19th Annual Conference of the Robotics Society of Japan 2001, (2001), pp.895-896, in Japanese. abstract
D.Isobe: Deriving Inverse Dynamics of Open/Closed Loop Mechanisms: A Unified Approach Using Finite Element Method, Proceedings of the First Asian-Pacific Congress on Computational Mechanics, (2001), Sydney, Australia. abstract
D.Isobe: A Unified Numerical Scheme for Calculating Inverse Dynamics of Open/Closed Link Mechanisms, Proceedings of the 27th Annual Conference of the IEEE Industrial Electronics Society IECON'01, (2001), pp.341-344, Denver, USA. abstract
A.Yagi and D.Isobe: Calculating Inverse Dynamics for Closed-Loop Link Mechanisms by Using FEM (Verification of Energy Consumption Level in the System), CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '02, No.02-6, (2002), in Japanese. abstract
Y.Chikugo, S.Sato and D.Isobe: Control Experiments of Link Mechanisms Using Inverse Dynamics Calculated by FEM, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '02, No.02-6, (2002), in Japanese. abstract
D.Isobe: A Finite Element Scheme for Calculating Inverse Dynamics of Link Mechanisms, Abstracts of the 5th World Congress on Computational Mechanics, (2002), pp.II-658, Vienna, Austria. abstract
D.Isobe, D.Imaizumi, Y.Chikugo and S.Sato: FF Control of Link Mechanisms by Parallel Solution Scheme of Inverse Dynamics, CD-ROM Proceedings of the 20th Annual Conference of the Robotics Society of Japan 2002, (2002), in Japanese. abstract
D.Imaizumi and D.Isobe: Calculating Kinematics and Inverse Dynamics of Flexible Manipulators by Using Finite Element Method, Proceedings of the Conference on Computational Engineering and Science, Vol.8, No.1, (2003), pp.489-492, in Japanese. abstract
D.Isobe and D.Imaizumi: Calculating Inverse Dynamics for Flexible Manipulators by Using a Parallel Solution Scheme, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '03, No.03-4, (2003), in Japanese. abstract
D.Isobe, Y.Chikugo, D.Imaizumi and S.Sato: Feed-Forward Control of Continuously Transforming Link Systems by Using a Parallel Solution Scheme, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '03, No.03-4, (2003), in Japanese. abstract
D.Isobe and D.Imaizumi: A Parallel Solution Scheme of Inverse Dynamics for Flexible Manipulators, Proceedings of the 9th IASTED International Conference on Robotics and Applications, (2003), pp.106-111, Salzburg, Austria. abstract
D.Isobe, D.Imaizumi and Y.Chikugo: Development of a Parallel Solution Scheme of Inverse Dynamics for Link Mechanisms (Aiming Construction of a Unified Scheme), Proceedings of the Mechanical Engineering Congress, 2003 JSME, No.03-1, Vol.1, (2003), pp.37-38, in Japanese. abstract
A.Yagi and D.Isobe: Calculating Inverse Dynamics for Multi-branch Link Systems by a Parallel Solution Scheme, CD-ROM Proceedings of the 21st Annual Conference of the Robotics Society of Japan 2003, (2003), in Japanese. abstract
S.Sato and D.Isobe: Force Control of Link Systems by Using a Parallel Solution Scheme, CD-ROM Proceedings of the 21st Annual Conference of the Robotics Society of Japan 2003, (2003), in Japanese. abstract
D.Isobe, Y.Chikugo, D.Imaizumi, S.Sato and A.Yagi: Feed-Forward Control of Link Mechanisms under Various Boundary Conditions by Using a Parallel Solution Scheme, Proceedings on 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), (2003), pp.2773-2778, Las Vegas, USA. abstract
D.Isobe, S.Sato and A.Yagi: Development of Inverse Dynamics Solution Scheme for Purpose of General Use, Proceedings of the 9th Robotics Symposia, (2004), pp.51-57, in Japanese. abstract
A.Kato and D.Isobe: Calculating Trajectories for Flexible Manipulators by Using Finite Element Method, Proceedings of the Conference on Computational Engineering and Science, Vol.9, No.2, (2004), pp.733-736, in Japanese. abstract
D.Isobe and S.Sato: Force Control of Link Systems Using the Parallel Solution Scheme, Proceedings of the 10th IASTED International Conference on Robotics and Applications, (2004), pp.239-244, Hawaii, USA. abstract
A.Kato and D.Isobe: Calculating Inverse Dynamics of Flexible Manipulators by Using Parallel Solution Scheme, CD-ROM Proceedings of the 22nd Annual Conference of the Robotics Society of Japan 2004, (2004), in Japanese. abstract
D.Isobe and A.Yagi: General-Purpose Expression of Structural Connectivity in the Parallel Solution Scheme of Inverse Dynamics, Proceedings on 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), (2004), pp.3513-3518, Sendai, Japan. abstract
D.Isobe: Application of Parallel Solution Scheme Towards Hyper Multi-Freedom System Control, Proceedings of the 5th Annual Conference of the SICE System Integration Division (SI2004), (2004), pp.432-433, in Japanese. abstract
A.Kato and D.Isobe: Calculating Inverse Dynamics of Flexible Manipulators by Using Parallel Solution Scheme, CD-ROM Proceedings of the 23rd Annual Conference of the Robotics Society of Japan 2005, (2005), in Japanese. abstract
A.Kato and D.Isobe: Feed-Forward Control of Flexible Manipulators by Using Parallel Solution Scheme, Proceedings of the 18th JSME Computational Mechanics Conference, No.05-2, (2005), pp.717-718, in Japanese. abstract
A.Kato and D.Isobe: Control of Multi-Joint Flexible Link System Using Parallel Solution Scheme of Inverse Dynamics, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '06, No.06-4, (2006), in Japanese. abstract
K. Yamanaka, A. Kato and D. Isobe: Model-based feed-forward control of flexible link systems, Proceedings of the 19th JSME Computational Mechanics Conference, No.06-9, (2006), pp.235-236, in Japanese. abstract
K. Yamanaka, H, Ueda and D. Isobe: Feed-Forward Control of a Robotic Mechanism Using Parallel Solution Scheme, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '07, No.07-2, (2007), in Japanese. abstract
D. Isobe and K. Yamanaka: Development of a Unified Feed-Forward Control System for Robotic Mechanisms using Finite Element Approach, CD-ROM Proceedings of APCOM'07-EPMESC XI, (2007), Kyoto, Japan. abstract
Y. Kitamura, K. Yamanaka and D. Isobe: Inverse Dynamics Calculation of Underactuated Link Systems Using Parallel Solution Scheme, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '08, No.08-4, (2008), in Japanese. abstract
T. Sonoda, K. Ishii and D. Isobe: Inverse Dynamics Calculation for Closed Link Mechanisms Employing COG Jacobian, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '08, No.08-4, (2008), in Japanese. abstract
T. Sonoda, K. Ishii and D. Isobe: Dynamics Computation of Link Mechanisms Employing COG Jacobian, Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, (2008), Xi'an, China. abstract
Y. Kitamura and D. Isobe: Inverse Dynamics Calculation of Underactuated Link Systems Considering Elastic Deformations, CD-ROM Proceedings of the 26th Annual Conference of the Robotics Society of Japan 2008, (2008), in Japanese. abstract
H. Ueda and D. Isobe: Feed-Forward Control of Structure-Varying Multi-Armed Manipulator, CD-ROM Proceedings of the 26th Annual Conference of the Robotics Society of Japan 2008, (2008), in Japanese. abstract
T. Sonoda, K. Ishii and D. Isobe: Dynamics Calculation of Link Mechanisms Employing COG Jacobian, CD-ROM Proceedings of the 26th Annual Conference of the Robotics Society of Japan 2008, (2008), in Japanese. abstract
T. Sonoda, K. Ishii and D. Isobe: Unified Dynamics Calculation employing COG Jacobian for Link Mechanisms, Proceedings of Joint 4th International Conference on Soft Computing and Intelligent Systems and 9th International Symposium on Advanced Intelligent Systems (SCIS & ISIS 2008), (2008), Nagoya, Japan. abstract
D. Isobe, K. Yamanaka and Y. Kitamura: Inverse Dynamics Calculation of Underactuated Link Systems Using Parallel Solution Scheme, Proceedings of the 34th Annual Conference of the IEEE Industrial Electronics Society IECON'08, (2008), pp.1632-1637, Orlando, Florida, USA. abstract
H. Ueda and D. Isobe: Development of General-Purpose Feed-Forward Control System for Link Systems, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '09, No.09-4, (2009), in Japanese. abstract
J. Hayakawa and D. Isobe: Feed-Forward Control of Mobile Robot Using Parallel Solution Scheme, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '09, No.09-4, (2009), in Japanese. abstract
Y. Matsui and D. Isobe: Proposal of Torque Cancelling System for Stabilizing Mechanical Sway, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '09, No.09-4, (2009), in Japanese. abstract
Y. Kitamura and D. Isobe: Feed-Forward Control of Two-Joint Underactuated Link System Using Parallel Solution Scheme, CD-ROM Proceedings of the 27th Annual Conference of the Robotics Society of Japan 2009, (2009), in Japanese. abstract
Y. Matsui, K. Kondo and D. Isobe: Proposal of Torque Cancelling System Using Parallel Solution Scheme, Proceedings of the 15th Robotics Symposia, (2010), pp.226-231, in Japanese. abstract
Y. Matsui, K. Kondo and D. Isobe: Mechanical Sway Stabilization of Flexible Link System Using a TCS, CD-ROM Proceedings of the 28th Annual Conference of the Robotics Society of Japan 2010, (2010), in Japanese. abstract
D. Isobe, Y. Matsui and K. Kondo: A Torque Cancelling System Using the Parallel Solution Scheme, CD-ROM Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA2011), (2011), pp.1064-1070, Shanghai, China. abstract
D. Isobe, B. Nakayama and K. Kondo: Stabilizing Mechanical Sway of a Walking Robot Using a Torque Cancelling System, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '12, No.12-3, (2012), in Japanese. abstract
R. Zhu and D. Isobe:Inverse Dynamics Calculation of a Robot with Linear-Motion Link Mechanism using Parallel Solution Scheme, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '13, No.13-2, (2013), in Japanese. abstract
Y. Imai and D. Isobe:Vibration Control and Mechanical Sway Stabilization of Flexible Link System, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '13, No.13-2, (2013), in Japanese. abstract
K. Fujii and D. Isobe:Development of Motion Planning Scheme for Compensating Elastic Deformation of Flexible Link Systems, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '13, No.13-2, (2013), in Japanese. abstract
M. Fukudome and D. Isobe: Development of Dynamics Simulator using Finite Element Method, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '14, No.14-2, (2014), in Japanese. abstract
W. Du and D. Isobe: Mechanical Sway Suppression of a Small Toy Robot Using a Torque Cancelling System, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '14, No.14-2, (2014), in Japanese. abstract
D. Isobe:
to HOME![]() to TOP
to TOP![]()