一方、カメラ2台を用いてトレーサ粒子をステレオ視することで、二次元面内における速度三成分を計測するステレオPIVは、従来のPIVシステムを発展させることで比較的容易にシステムを構築できるため、次世代PIVとして注目されている。
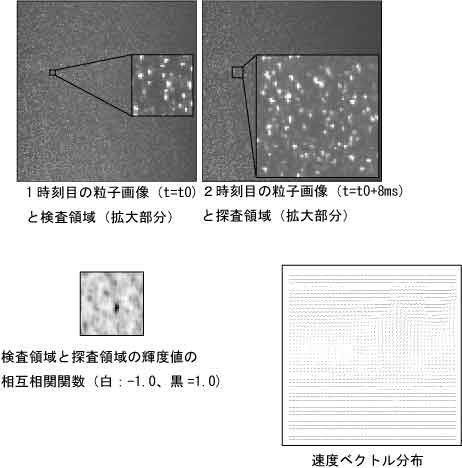
ステレオPIVではトレーサ粒子を懸濁した流動場にパルスシート光を照射し、トレーサ粒子からの散乱光を2台のCCDカメラで撮影する。パルスシート光は短い時間間隔dtで2回照射し、それぞれの散乱光をCCDカメラの時間的に連続する2フレームに撮影する。図2は可視化された粒子画像の例である。
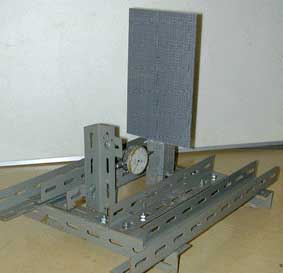
画像座標の任意の点とそれに対応する物理座標における直線の関係は、AB面およびCD面に図3に示すような校正板を挿入し、その画像から画像座標と物理座標を対応づける写像関数を作成する。校正板は既知の間隔の格子線を描いたものであり 、アームを介して微動送り台に固定されている。校正板には基準となる点(基準点)を示すためのマークを書き込んでおき(図4参照)、このマーク近傍(例えば右下)の格子点の位置を定めておく。
校正板
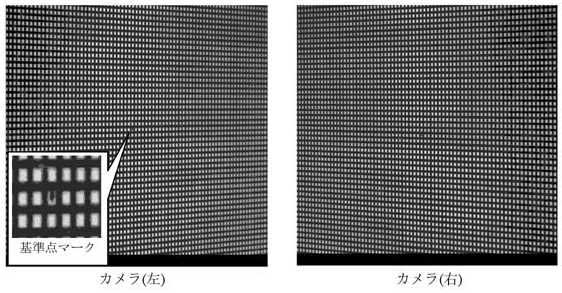
図4 校正板画像
画像座標の任意の点とそれに対応する物理座標における直線の関係は、AB面およびCD面に図3に示すような校正板を挿入し、その画像から画像座標と物理座標を対応づける写像関数を作成する。校正板は既知の間隔の格子線を描いたものであり 、アームを介して微動送り台に固定されている。校正板には基準となる点(基準点)を示すためのマークを書き込んでおき(図4参照)、このマーク近傍(例えば右下)の格子点の位置を定めておく。
校正手順は次のとおりである。
(1)校正板をシート光面中央(AB面, z=z0)に位置するよう設置する。
(2)校正板をCCDカメラで撮影し画像を記憶する(校正画像)。ここで、基準点が画像中にあるようにする。
(3)校正画像の格子点の画像座標を求めるために、あらかじめソフトウェア的に用意しておいた格子パタンと校正画像全体の相互相関関数を求め、相関係数のピーク位置を格子点とする。この段階で、各格子点の画像座標のリスト(格子点リスト)が出来上がる。
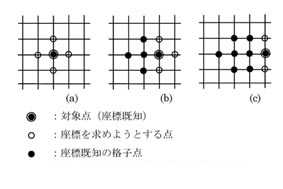
(4)次に、各格子点の物理座標を求める。物理座標が既知である基準点を対象点とし、対象点の4近傍にある格子点を格子点リストから探しだし、それら4点の物理座標を対象点の物理座標と格子間隔から算出する(図4(a))。これにより、対象点に加えてその近傍4点の物理座標が既知となるので、今度はこれら4点をそれぞれ対象点として同様の操作を再帰的に繰り返せば、全ての格子点座標を算出することができる(図4(b)(c))。こうして、各格子点の画像座標と物理座標の対応リストを作る。
(5)画像座標と物理座標の対応リストから最小二乗法を用いて画像座標から物理座標への写像関数fx(X,Y)、fy(X,Y)およびその逆関数FX(x,y)、FY(x,y)のそれぞれの係数ai, bi, ci, diを求める。ここでx,yは物理座標、X,Yは画像座標であり、写像関数は3次多項式とした。
 (2a)
(2a)  (2b)
(2b)  (3a)
(3a)  (3b)
(3b)
以上により、z=z0における写像関数が求まる。
(6)つぎに、微動送り台を用いて校正板をその面と垂直な方向に移動する(CD面, z=z1)。移動量は画像中で格子点が10〜20画素移動するのに相当する程度であり、後述の例では2mmである。
(7)上記(2)〜(5)と同様にしてz=z1における写像関数を求める。
以上の操作により、画像における任意の点に対応するz=z0およびz=z1面における物理的な位置が得られることになる。