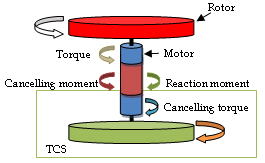
図1 1軸回りTCSの概念
ロボットが腕や脚,あるいは重量物を高速に振り回したりする際に,系全体に動揺が生じる場合がある.それは,入力トルクの反作用として回転軸回りにモーメントが発生することが原因として考えられる.モーメントによる動揺を機械的に抑制する方法として,入力トルクの反作用モーメントを打ち消すためのモーメントを別の機構により発生させ,お互いを打ち消し合うことで動揺を抑制させる方法が挙げられる.この方法は,ロボットの動作に多い回転運動に対する動揺を抑制できるという利点があるが,モーメントの発生機構に入力するトルクが動作対象のダイナミクスを正確に表現したものでないと逆効果になるという問題点がある.我々は,独自に開発した並列的逆動力学計算法(以後,並列的解法と記す)を使用することで,この問題点を解決することを試みた.並列的解法は,従来の逆動力学計算法のように動作に必要なトルクを算出するだけでなく,有限要素法を基に開発されているため任意の箇所に発生するモーメントを算出できるという特徴を有している.そのため,並列的解法を利用することで複雑な機構の複雑な動作に対するトルク供給,およびそれに伴う動揺を抑制するためのトルクの供給が単一のシステムで実現され,ロボット機構の高速動作における安定性の向上に大きく貢献できるものと思われる.
図1 1軸回りTCSの概念
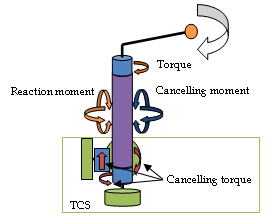
図2 3軸回りTCSの概念
TCSとは,前節で算出されたモーメントを用いて動揺を抑制するシステムである.簡単のために図1の1軸回りに対応したTCS の概念図で説明する.図上の物体を回転体,図下の物体をTCS,上下の物体をつないでいるものを軸とするとき,回転体を動作させる際に軸回りにモーメントが発生する.そのため,軸は回転体とは反対回りに回転してしまう.しかし,下のTCS
から逆位相のモーメントを発生させることで,お互いのモーメントが打消し合い,軸は回転しなくなる.
また,図2のように偏心性のある物体を動作させる際には,回転軸回りにモーメントが発生するだけでなく,他軸回りにもモーメントが発生する.つまり系全体の動揺を抑制するためには,3軸回りのモーメントを打ち消すことが可能なTCSを配置し,ダイナミクスを考慮した正確なモーメントを求める必要がある.
動揺を抑制するためには,動作トルクに対して発生する,反作用モーメントと逆位相のモーメントをTCS部に発生させれば良い.TCSに入力するべきトルクは,TCS部に発生させるべきモーメントのさらに逆位相にしたものとなる.すなわち,TCSに入力するトルクとしては,TCS部に発生するモーメントを用いれば良いことになる.
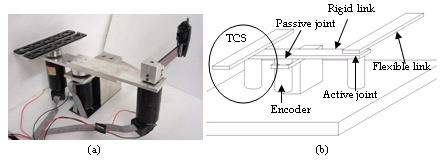
実験に用いた実機を図3に示す.動作リンクには柔軟な材質であるポリカボネートを使用し,動作リンクの先端に0.1[kg]の重りを配置した.TCSと実機を構成しているリンクの材質はステンレスである.また,動揺の抑制状態を数値的に確認するために,接地部にエンコーダを配置した.解析を行うために,図3の実機を有限要素に分割し数値モデル化した.
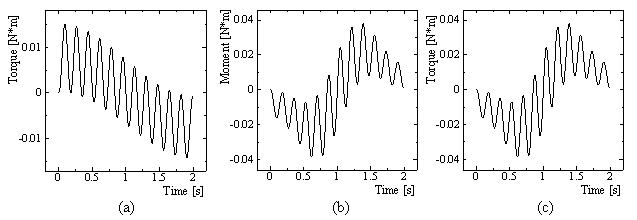
実機の動作リンクを2.0[s]でπ[rad]回転させる際に,発生する動揺の抑制実験を行った.動揺の抑制状態を確認するためにTCSを使用しない場合と使用する場合の2種類で実験を行い,結果を比較した.並列的解法により算出された動作リンクに必要なトルクを図4(a)に示し,動作によりTCS部に発生したモーメントを図4(b)に示す.前節で述べたように,TCSに入力するトルクはTCS部に発生するモーメントと同値で良い.よってTCSに入力するトルクは図4(c)に示すものとなる.
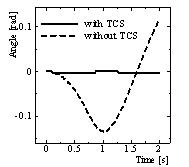
図5 受動関節回りの回転角
柔軟リンク系の動揺抑制実験の結果を図5に示す.図5は最下部のエンコーダで検知した機構本体の支点回りの回転角度である.図より,TCSを使用していない場合にはモーメントの影響により本体が大きく回転していることが分かる.一方,TCSを使用した場合には本体がほとんど回転していない.このことから,回転体の動作によって発生する動揺をTCSにより抑制できることが確認された.
HOMEへ![]() TOPへ
TOPへ![]()
D. Isobe: Unified Solution Scheme for Inverse Dynamics of Robotic Systems, Progress in Autonomous Robot Research (Editor: F.N. Mortensen), Nova Science Publishers, ISBN:978-1-60456-281-1, pp.125-173, 2008. NOVA
D. Isobe: A Torque Cancelling System for Quick-Motion Robots, Intelligent Mechatronics (Editor: Ganesh Naik), InTech, ISBN:978-953-307-300-2, pp. 21-40, 2011. Open Access
磯部大吾郎,はり要素で解く構造動力学:建物の崩壊解析からロボット機構の制御まで Fortran90・C++ソースコード付,丸善出版,ISBN:978-4-621-30544-7, 2020. Maruzen Amazon
D. Isobe: A Unified Solution Scheme for Inverse Dynamics, Advanced Robotics, Vol.18, No.9, (2004), pp.859-880. DOI: 10.1163/1568553042225778
磯部大吾郎,加藤 昭博: フレキシブル・リンク系のモデルベースド・フィードフォワード制御, 日本ロボット学会誌, Vol.25, No.4, (2007), pp.625-631. DOI: 10.7210/jrsj.25.625
D. Isobe and A. Kato: Feedforward Control of Flexible Link Systems using Parallel Solution Scheme, International Journal of Robotics and Automation, Vol.23, No.1, (2008), pp.31-39. DOI: 10.2316/Journal.206.2008.1.206-3047
磯部 大吾郎, 松井 康将, 近藤 健介: 並列的逆動力学計算法を用いたトルクキャンセリングシステムの開発, 日本機械学会論文集C編, Vol. 77, No. 775, (2011), pp.785-798. DOI: 10.1299/kikaic.77.785
磯部 大吾郎, 北村 悠人: 並列的逆動力学計算法を用いた劣駆動リンク系の動力学補償, 日本機械学会論文集C編, Vol. 77, No. 775, (2011), pp.799-812. DOI: 10.1299/kikaic.77.799
D. Isobe, B. Nakayama and K. Kondo: A Torque-Canceling System Using the Inverse Dynamics Parallel Solution Scheme, Advanced Robotics, Vol.28, No.2, (2014), pp.119-132. DOI: 10.1080/01691864.2013.857277
松井 康将,磯部大吾郎: 力学的動揺を安定化させるトルクキャンセリングシステムの提案, 日本機械学会ロボティクス・メカトロニクス講演会'09講演論文集CD-ROM, No.09-4, (2009). abstract
松井 康将,近藤 健介,磯部大吾郎: 並列的解法を用いたトルクキャンセリングシステムの提案, 第15回ロボティクスシンポジア予稿集, (2010), pp.226-231. abstract
松井 康将, 近藤 健介, 磯部大吾郎: 柔軟リンク系に対するTCSを用いた動揺抑制実験, 第28回日本ロボット学会学術講演会論文集CD-ROM, (2010). abstract
D. Isobe, Y. Matsui and K. Kondo: A Torque Cancelling System Using the Parallel Solution Scheme, CD-ROM Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA2011), (2011), pp.1064-1070, Shanghai, China. abstract
近藤 健介,松井 康将,磯部大吾郎: 並列的解法を用いたトルクキャンセリングシステムの開発, 計算工学講演会論文集CD-ROM, 第16巻, (2011). abstract
中山 文平,近藤 健介,松井 康将,磯部大吾郎: トルクキャンセリングシステムのロボットへの搭載に向けた動揺抑制実験, 日本機械学会ロボティクス・メカトロニクス講演会'11講演論文集CD-ROM, No.11-5, (2011). abstract
近藤 健介,磯部大吾郎: TCSを用いたリンク系における多軸回りの動揺抑制実験, 第29回日本ロボット学会学術講演会論文集CD-ROM, (2011). abstract
磯部大吾郎,中山 文平,近藤 健介: トルクキャンセリングシステムを用いた歩行ロボットの動揺抑制, 日本機械学会ロボティクス・メカトロニクス講演会'12講演論文集CD-ROM, No.12-3, (2012). abstract
今井 勇佑,磯部大吾郎:柔軟リンク系の振動・動揺抑制, 日本機械学会ロボティクス・メカトロニクス講演会'13講演論文集CD-ROM, No.13-2, (2013). abstract
藤井 浩平,磯部大吾郎:柔軟リンク系の弾性変形を補償する動作計画手法の開発, 日本機械学会ロボティクス・メカトロニクス講演会'13講演論文集CD-ROM, No.13-2, (2013). abstract
福留 光紀,磯部大吾郎: 有限要素法を用いた動力学シミュレータの開発, 日本機械学会ロボティクス・メカトロニクス講演会'14講演論文集CD-ROM, No.14-2, (2014). abstract
杜 偉,磯部大吾郎 :トルクキャンセリングシステムを用いた遊戯用小型ロボットの動揺抑制, 日本機械学会ロボティクス・メカトロニクス講演会'14講演論文集CD-ROM, No.14-2, (2014). abstract
D. Isobe: Solving problems in structural dynamics using beam elements: From collapse behaviors of buildings to torque cancelling of robots, Plenary Lecture, Abstracts of the 11th International Conference on Computational Methods (ICCM2020), (2020), Virtual Conference. abstract
D. Isobe: Beam elements and their applications in various fields of structural dynamics, Plenary Lecture, the 28th International Conference on Computational & Experimental Engineering and Sciences (ICCES2022), (2022), Virtual Conference. abstract
D. Isobe:
HOMEへ![]() TOPへ
TOPへ![]()