圧電アクチュエータ集合体の変形
従来のロボットは,そのほとんどが剛体と剛体とをジョイントで接続し,モータを駆動源として動かすため,反応が鈍く,動作がぎこちないといった欠点をもつ.そこで本研究では,高速反応性を示す圧電アクチュエータを多数連結することにより,従来のロボットでは難しかった滑らかな動きをする圧電アクチュエータ集合体ロボットの開発を目指し,その基盤となる圧電アクチュエータ集合体モジュールのリアルタイム制御法の開発をおこなう.制御法としては,主に構造や流体などの数値解析をおこなう手法として用いられるFEM(有限要素法)を使用する.FEMを使用することにより,個々のアクチュエータを有限要素で離散化し,剛性マトリックスに個々の情報を盛り込むことによって全体の挙動を把握することが可能であり,不慮の故障などに対処する冗長性をもたせることができる.しかしFEMは,一般的には要素数の細分化により解の精度を高める必要があるため,リアルタイム処理には不適当である.そこで,曲げ型の面内変位モードを含むことで,少ない要素数でも精度の良い解が得られる非適合要素を導入し,解析時間を短縮しリアルタイム性を実現した.
以前までは,圧電アクチュエータに印加される電圧が大きくなるにつれてヒステリシス(履歴)の影響が生じ,目標変位の追従性に若干誤差が生じた.そこで,実験的考察から時間依存性のあるクリープ,残留変位の経験式を導出し,それをFEMによる逆解析アルゴリズムと融合させることにより,リアルタイム性を損なうことなく材料特性を精度良く考慮した.
実際に本アルゴリズムを使用した制御システムを開発し,圧電アクチュエータ集合体の準静的制御実験を実施した.
圧電アクチュエータ集合体の変形
FEMを用いたリアルタイム制御システム
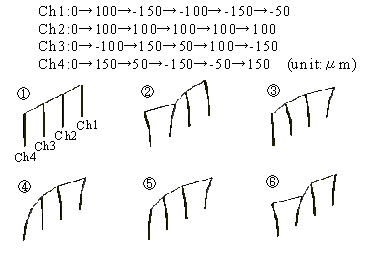
圧電アクチュエータ集合体の制御目標
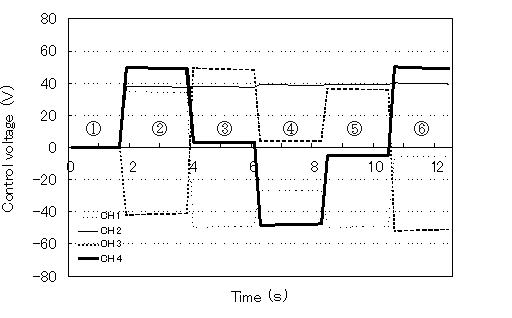
FEM制御システムによって算出された制御電圧
(時間依存特性を考慮)
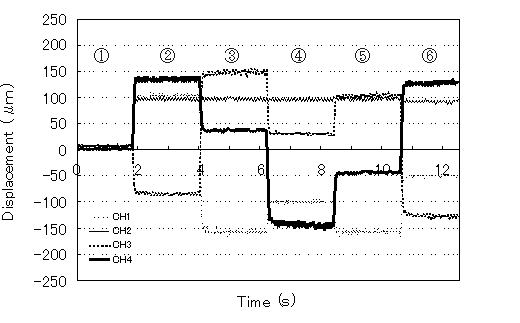
制御結果
全体的にクリープおよび残留変位の影響が抑えられ,各アクチュエータが目標とする一定の変位に収束していることが確認できる.また,例えばCh1とCh2の同じ100 μmを目標とした領域でも,Ch1では34.9 V,Ch2では38.2 Vと違う制御電圧値が計算されている.このことから,弾性体で連結された4本のアクチュエータが1つの連続体として取り扱われ,有限要素法により適切に制御電圧が算出されていることが確認できた.
HOMEへ![]() TOPへ
TOPへ![]()
D. Isobe and H. Nakagawa: A Parallel Control System for Continuous Architecture Using Finite Element Method, Journal of Intelligent Material Systems and Structures, Vol.9, No.12, (1998), pp.1038-1045. DOI: 10.1177/1045389X9800901209
磯部大吾郎, 中川 恒: FEMによる圧電アクチュエータ集合体のリアルタイム並列制御, 日本機械学会論文集 (A編), 第65巻, 第629号, (1999), pp.120-126. DOI: 10.1299/kikaia.65.120
D. Isobe and H. Nakagawa: Real-Time Parallel Control of Connected Piezoelectric Actuators by Using FEM, JSME International Journal Series A, Vol.43, No.1, (2000), pp.19-25. DOI: 10.1299/jsmea.43.19
D. Isobe, H. Nakamura and R. Shimizu: Real-time FEM Control System for Connected Piezoelectric Actuators, Journal of Robotics and Mechatronics, Vol.12, No.2, (2000), pp.172-179. DOI: 10.20965/jrm.2000.p0172
磯部大吾郎, 中村 博,清水 隆太: 圧電アクチュエータ集合体のリアルタイムFEM制御システムの開発, 日本機械学会論文集 (A編), 第66巻, 第645号, (2000), pp.861-866. DOI: 10.1299/kikaia.66.861
藤井 輝夫, 磯部大吾郎, 黒田 洋司: 超並列有限要素ロボットの研究 -概念と基礎的検討-, 日本機械学会ロボティクス・メカトロニクス講演会'97講演論文集, No.97-22, Vol.B, (1997), pp.873-874. abstract
磯部大吾郎: 有限要素法による圧電アクチュエータ制御に関する一考察, 計算工学講演会論文集, 第2巻, 第3号, (1997), pp.1075-1078. abstract
磯部大吾郎: FEMによる圧電アクチュエータ集合体の静的変形制御, 日本機械学会関東支部茨城講演会講演論文集, (1997), pp.71-72. abstract
磯部大吾郎: 圧電アクチュエータ集合体の新制御法に関する考察, 第5回運動と振動の制御シンポジウム講演論文集, No.97-31, (1997), pp.96-99. abstract
磯部大吾郎, 中川 恒: 圧電アクチュエータ集合体のFEMによる静的オープンループ制御, 計算工学講演会論文集, 第3巻, 第2号, (1998), pp.511-514.
磯部大吾郎, 清水 隆太, 中村 博, 中川 恒: 有限要素法を用いた圧電アクチュエータ集合体のリアルタイム制御, 日本機械学会ロボティクス・メカトロニクス講演会'98講演論文集CD-ROM, No.98-4, (1998). abstract
磯部大吾郎, 清水 隆太: 非線形項を導入したFEMによる圧電アクチュエータの準静的制御, 日本機械学会第76期全国大会講演論文集, No.98-3, Vol.2, (1998), pp.183-184. abstract
磯部大吾郎, 中村 博: 一般逆行列を用いたバイモルフ型圧電アクチュエータの逆解析, 日本機械学会第76期全国大会講演論文集, No.98-3, Vol.2, (1998), pp.185-186. abstract
磯部大吾郎, 清水 隆太: 圧電アクチュエータのクリープ・残留ひずみを考慮した準静的FEM制御, 日本機械学会第11回計算力学講演会講演論文集, No.98-2, (1998), pp.545-546. abstract
磯部大吾郎, 清水 隆太, 中村 博, 山海 嘉之: 圧電アクチュエータ集合体のFEM最適制御システム, 計算工学講演会論文集, 第4巻, 第2号, (1999), pp.913-916. abstract
磯部大吾郎, 中村 博, 清水 隆太: 圧電アクチュエータ集合体のリアルタイムFEM制御システムの開発, 日本機械学会ロボティクス・メカトロニクス講演会'99講演論文集CD-ROM, No.99-9, (1999). abstract
D.Isobe, H.Nakamura, R.Shimizu and H.Nakagawa: Development of Piezoelectric Actuator Control System Using FEM, Proceedings of the 1st International Conference on Advances in Structural Engineering and Mechanics ASEM'99, Vol.1, (1999), pp.863-868, Seoul, Korea.
磯部大吾郎, 清水 隆太, 中村 博: 圧電アクチュエータ集合体の準静的FEM制御システムの開発, 日本機械学会第12回計算力学講演会講演論文集, No.99-5, (1999), pp.307-308. abstract
HOMEへ![]() TOPへ
TOPへ![]()