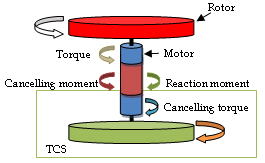
Fig. 1 General concept of uniaxial TCS
Mechanical sway generated by reaction moments occurring in the motion,
for example, of space stations is a big issue that can not be neglected.
Motion controls using the conservative law of angular momentum are applied
by driving control momentum gyros (CMG) or reaction wheels. Applications
of the gyros and the wheels are generally limited to slow momentum transitions,
relying upon high-gain feedback control. Although the same strategy can
be used in the motion control of robots when the momentum transitions are
not so fast, the dynamics of the robots should be considered to effectively
control quicker motions. The torque cancelling system (TCS) developed in
our lab cancels the reaction moment generated by the motion of an object
by considering the precise dynamics of the object and the body of the robot
itself. The reaction moment can be obtained accurately using a newly proposed
solution scheme of inverse dynamics, which handles the dynamics of complex
robotic architectures by modelling them with finite elements. Once the
reaction moment is known, it can be cancelled by applying an anti-torque
to a torque generating device.
The newly proposed solution scheme of inverse dynamics mentioned above
is called the parallel solution scheme, and it was developed on the basis
of a finite element approach. In contrast to the conventional and revised
schemes, which use dynamic equations, the proposed scheme can handle different
types of configurations, such as open-loop, closed-loop, or multibranch
link systems, and can also consider the elasticity of constituted links
or passive joints by only changing the input numerical model, without the
need to revise any part of the scheme. Its validity in various feedforward
control experiments of various kinds of link systems has been verified.
Fig. 1 General concept of uniaxial TCS
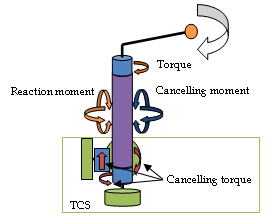
Fig. 2 General concept of triaxial TCS
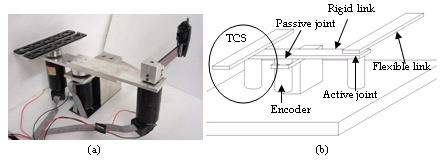
A simple rotor-TCS experimental setup, as shown in Figs. 3(a) and 3(b),
was made to carry out a numerical estimation and some experiments for verification.
In this setup, a flexible link is driven by a gearless motor, and a prototype
TCS is placed at an offset position from the rotating axis of the active
joint. The link system is connected to the ground with a rotation-free
passive joint, where an encoder attached to a nonacutated motor is used
to detect the rotational angle of the overall body. The flexible link is
made of poly-carbonate, where the elastic deformation occurred in the link
should not be neglected in the inverse dynamics calculation. The experimental
setup is subdivided, with each connection to connection by a single Bernoulli-Euler
beam element. The whole system is modelled with a total of 4 elements and
5 nodes. The capabilities of modelling this kind of architecture with flexible
link and computing the dynamics are the main features of the parallel solution
scheme.
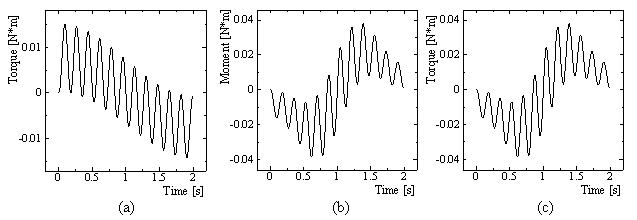
(a) Motion torque for driving an active joint
(b) Reaction moment generated at the exact location of TCS
(c) Input torque for TCS
Fig. 4 Motion torque, reaction moment, and input torque for uniaxial TCS
A rotational motion of π rad in 2 s is given to the active link. The torque required for the active joint is obtained by the parallel solution scheme as shown in Fig. 4(a). Reaction moment generated at the exact location of the TCS is calculated as shown in Fig. 4(b). To cancel this moment, the torque shown in Fig. 4(c) should be supplied to the TCS. Note that the cancelling torque the TCS has to generate is a perfect duplicate of the reaction moment (see Fig. 1).
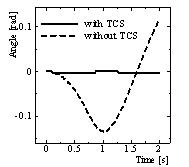
Fig. 5 Rotational angle of the link system around the passive joint during
the motion
Figure 5 shows the rotational angle of the link system detected at the encoder attached on the passive joint, when the motion torque is actually supplied to the active joint. It can be confirmed from the figure that the link system is unstable during the motion when the TCS is not activated, whereas the rotation around the passive joint stops perfectly when the TCS is activated, which means that the reaction moment generated around the rotating axis are cancelled perfectly by supplying the accurately computed cancelling torque to the TCS.
to HOME![]() to TOP
to TOP![]()
Related papers (Books):
D. Isobe: Unified Solution Scheme for Inverse Dynamics of Robotic Systems, Progress in Autonomous Robot Research (Editor: F.N. Mortensen), Nova Science Publishers, ISBN:978-1-60456-281-1, pp.125-173, 2008. NOVA
D. Isobe: A Torque Cancelling System for Quick-Motion Robots, Intelligent Mechatronics (Editor: Ganesh Naik), InTech, ISBN:978-953-307-300-2, pp. 21-40, 2011. Open Access
D. Isobe, Solving problems in structural dynamics using beam elements: From collapse behaviors of buildings to torque cancelling of robots, Maruzen, ISBN:978-4-621-30544-7, 2020. Maruzen Amazon
Related papers (Journals):
D.Isobe: A Unified Solution Scheme for Inverse Dynamics, Advanced Robotics, Vol.18, No.9, (2004), pp.859-880. DOI: 10.1163/1568553042225778
D. Isobe and A. Kato: Model-based Feed-forward Control of Flexible Link Systems, Journal of the Robotics Society of Japan, Vol.25, No.4, (2007), pp.625-631, in Japanese. DOI: 10.7210/jrsj.25.625
D. Isobe and A. Kato: Feedforward Control of Flexible Link Systems using Parallel Solution Scheme, International Journal of Robotics and Automation, Vol.23, No.1, (2008), pp.31-39. DOI: 10.2316/Journal.206.2008.1.206-3047
D. Isobe, Y. Matsui and K. Kondo: Development of a Torque Cancelling System Using Parallel Solution Scheme, Transactions of the Japan Society of Mechanical Engineers, Series C, Vol. 77, No. 775, (2011), pp.785-798, in Japanese. DOI: 10.1299/kikaic.77.785
D. Isobe and Y. Kitamura: Dynamics Compensation of Underactuated Link Systems Using Parallel Solution Scheme, Transactions of the Japan Society of Mechanical Engineers, Series C, Vol. 77, No. 775, (2011), pp.799-812, in Japanese. DOI: 10.1299/kikaic.77.799
D. Isobe, B. Nakayama and K. Kondo: A Torque-Canceling System Using the Inverse Dynamics Parallel Solution Scheme, Advanced Robotics, Vol.28, No.2, (2014), pp.119-132. DOI: 10.1080/01691864.2013.857277
Related papers (Proceedings):
Y. Matsui and D. Isobe: Proposal of Torque Cancelling System for Stabilizing Mechanical Sway, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '09, No.09-4, (2009), in Japanese. abstract
Y. Matsui, K. Kondo and D. Isobe: Proposal of Torque Cancelling System Using Parallel Solution Scheme, Proceedings of the 15th Robotics Symposia, (2010), pp.226-231, in Japanese. abstract
Y. Matsui, K. Kondo and D. Isobe: Mechanical Sway Stabilization of Flexible Link System Using a TCS, CD-ROM Proceedings of the 28th Annual Conference of the Robotics Society of Japan 2010, (2010), in Japanese. abstract
D. Isobe, Y. Matsui and K. Kondo: A Torque Cancelling System Using the Parallel Solution Scheme, CD-ROM Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA2011), (2011), pp.1064-1070, Shanghai, China. abstract
K. Kondo, Y. Matsui and D. Isobe: Development of Torque Cancelling System Using Parallel Solution Scheme, CD-ROM Proceedings of the Conference on Computational Engineering and Science, Vol.16, (2011), in Japanese. abstract
B. Nakayama, K. Kondo, Y. Matsui and D. Isobe: Mechanical Sway Stabilization Using a Torque Cancelling System Aiming for Installation in a Robot, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '11, No.11-5, (2011), in Japanese. abstract
K. Kondo and D. Isobe: Mechanical Sway Stabilization Experiment around Multiple Axes of Link System using TCS, CD-ROM Proceedings of the 29th Annual Conference of the Robotics Society of Japan 2011, (2011), in Japanese. abstract
D. Isobe, B. Nakayama and K. Kondo: Stabilizing Mechanical Sway of a Walking Robot Using a Torque Cancelling System, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '12, No.12-3, (2012), in Japanese. abstract
Y. Imai and D. Isobe:Vibration Control and Mechanical Sway Stabilization of Flexible Link System, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '13, No.13-2, (2013), in Japanese. abstract
K. Fujii and D. Isobe:Development of Motion Planning Scheme for Compensating Elastic Deformation of Flexible Link Systems, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '13, No.13-2, (2013), in Japanese. abstract
M. Fukudome and D. Isobe: Development of Dynamics Simulator using Finite Element Method, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '14, No.14-2, (2014), in Japanese. abstract
W. Du and D. Isobe: Mechanical Sway Suppression of a Small Toy Robot Using a Torque Cancelling System, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '14, No.14-2, (2014), in Japanese. abstract
D. Isobe: Solving problems in structural dynamics using beam elements: From collapse behaviors of buildings to torque cancelling of robots, Plenary Lecture, Abstracts of the 11th International Conference on Computational Methods (ICCM2020), (2020), Virtual Conference. abstract
D. Isobe: Beam elements and their applications in various fields of structural dynamics, Plenary Lecture, the 28th International Conference on Computational & Experimental Engineering and Sciences (ICCES2022), (2022), Virtual Conference. abstract
D. Isobe:
to HOME![]() to TOP
to TOP![]()