Quasi-static deformation of connected piezoelectric actuators
Parallel control of robotic systems, which is an adaptive control
scheme involving the reassembly of hardware systems into different
configurations while still using the same software, has been progressively
developed in recent years. The concept of robotic systems with high
adaptability to their environment is called Parallel Robotics, and is expected
to be applied in space, under the sea, mining, and construction, where
environments tend to change rapidly. Hamlin and Sanderson (1997), for example,
had made a prototype of robotic architecture which is capable of reassembling
into many different patterns of platforms consisting of linear actuators and
multi-link spherical joints.
In this paper, a parallel control system for a continuous architecture
formed by bimorph piezoelectric actuators has been developed and verified,
as a part of the research project by Fujii et al. (1997), with the goal
of constructing more human-like robots from a biological point of view.
The conventional control system necessitates the change of state equations
depending on the shape of a system or the quantity of the linked members.
On the other hand, the Finite Element Method (FEM), a generally used computational
tool in analyzing structures, fluids, etc., is capable of expressing the
behaviors of each discrete element, as well as the whole continuous system,
by evaluating the stiffness equations derived from the energy principle.
Flexible control can be achieved simply by changing the material properties
of the finite elements expressing the actuators, in case of disorder. Therefore,
the FEM, when used as a control scheme, may achieve a higher redundant
parallel control system.
Several steps are taken to enable real-time control by FEM. First, a simple inverse theory, which is obtained by considering the linearity of voltage distribution in bimorph piezoelectric actuators, is applied for calculating the control voltage. The algorithm using this theory consumes less computational memory. Second, a noncompatible four-node element is implemented into the FEM program. The finite element allows the in-plane bending mode by considering a noncompatible mode in shape functions. Although the continuity of displacement along the elemental boundary is not satisfied in the element, practical accuracy can be achieved by a minimum number of elements. Third, to minimize the effect of time-dependent characteristics of a piezoelectric material, empirical formulae for creep deformation and residual strain are evaluated, and are combined with the FEM inverse analytical algorithm.
In this research, the inverse analysis program using the FEM combined with
the empirical formulae, is implemented into a parallel control system.
The system, which consists of a PC, a bipolar DC unit and a signal-distributing
controller, is examined and verified by experiments on quasi-static displacement
control of connected piezoelectric actuators.
Quasi-static deformation of connected piezoelectric actuators
Control system using FEM
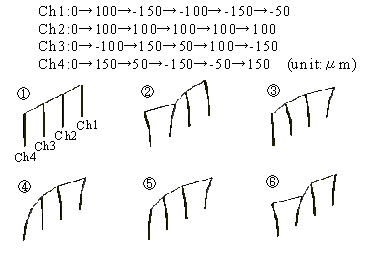
Control target for connected piezoelectric actuators
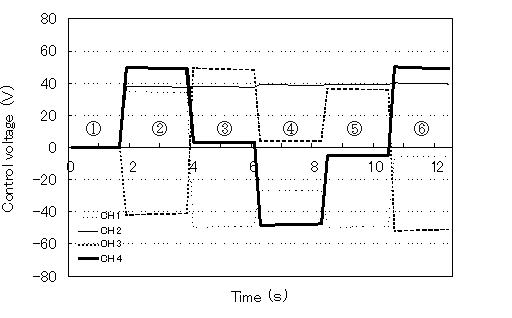
Calculated control voltage considering time-dependent characteristics
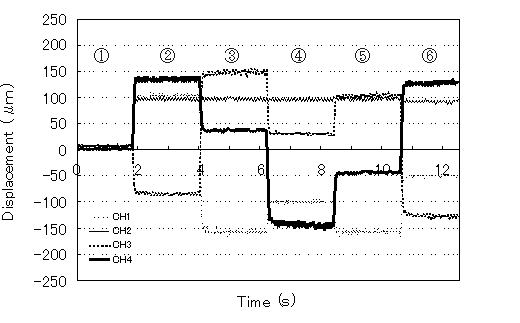
Attained displacement by FEM control
Four piezoelectric actuators (each with six finite elements) clumped at one end and connected at the other end with elastic material (natural rubber, two finite elements), is selected for the experimental model of quasi-static displacement control. The control voltage changes with time to minimize the effect of time-dependent characteristics. As seen in the figure above, the creep deformation and residual strain are effectively reduced, and practically accurate control is achieved. The experimental data suggest that the FEM control system handles the effect of the material connecting the actuators, since the control voltage varies when the property data of the connecting material are changed.
to HOME![]() to TOP
to TOP![]()
Related papers (Journals):
D.Isobe and H.Nakagawa: A Parallel Control System for Continuous Architecture Using Finite Element Method, Journal of Intelligent Material Systems and Structures, Vol.9, No.12, (1998), pp.1038-1045. DOI: 10.1177/1045389X9800901209
D.Isobe and H.Nakagawa: Real-Time Parallel Control of Connected Piezoelectric Actuators by Using FEM, Transactions of the Japan Society of Mechanical Engineers, Series A, Vol.65, No.629, (1999), pp.120-126, in Japanese. DOI: 10.1299/kikaia.65.120
D.Isobe and H.Nakagawa: Real-Time Parallel Control of Connected Piezoelectric Actuators by Using FEM, JSME International Journal Series A, Vol.43, No.1, (2000), pp.19-25. DOI: 10.1299/jsmea.43.19
D.Isobe, H.Nakamura and R.Shimizu: Real-time FEM Control System for Connected Piezoelectric Actuators, Journal of Robotics and Mechatronics, Vol.12, No.2, (2000), pp.172-179. DOI: 10.20965/jrm.2000.p0172
D.Isobe, H.Nakamura and R.Shimizu: Development of Real Time FEM Control System of Connected Piezoelectric Actuators, Transactions of the Japan Society of Mechanical Engineers, Series A, Vol.66, No.645, (2000), pp.861-866, in Japanese. DOI: 10.1299/kikaia.66.861
Related papers (Proceedings):
T.Fujii, D.Isobe and Y.Kuroda: Finite Element Super Parallel Actuators: FESPA -Its Concept and Basic Analysis-, Proceedings of the JSME Annual Conference on Robotics and Mechatronics '97, No.97-22, Vol.B, (1997), pp.873-874, in Japanese. abstract
D.Isobe: A Study on Piezoelectric Actuator Control by Using Finite Element Method, Proceedings of the Conference on Computational Engineering and Science, Vol.2, No.3, (1997), pp.1075-1078, in Japanese. abstract
D.Isobe: Static Positioning Control of Connected Piezoelectric Actuators by Using FEM, Proceedings of the Ibaraki District Conference JSME, (1997), pp.71-72, in Japanese. abstract
D.Isobe: A Study on New Control Method of Connected Piezoelectric Actuators, Proceedings of the 5th Motion and Vibration Control Symposium, No.97-31, (1997), pp.96-99, in Japanese. abstract
D.Isobe and H.Nakagawa: Static Open Loop Control of Connected Piezoelectric Actuators by Using FEM, Proceedings of the Conference on Computational Engineering and Science, Vol.3, No.2, (1998), pp.511-514, in Japanese. abstract
D.Isobe, R.Shimizu, H.Nakamura and H.Nakagawa: Real-Time Control of Connected Piezoelectric Actuators by Using Finite Element Method, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '98, No.98-4, (1998), in Japanese. abstract
D.Isobe and R.Shimizu: Quasi-Static Control of Piezoelectric Actuators Using FEM with Nonlinear Terms, Proceedings of the 76th JSME Fall Annual Meeting, No.98-3, Vol.2, (1998), pp.183-184, in Japanese. abstract
D.Isobe and H.Nakamura: Inverse Analysis of Bimorph Piezoelectric Actuators Using Generalized Inverse Matrix, Proceedings of the 76th JSME Fall Annual Meeting, No.98-3, Vol.2, (1998), pp.185-186, in Japanese. abstract
D.Isobe and R.Shimizu: Quasi-Static FEM Control of Piezoelectric Actuators Considering Creep and Residual Strain, Proceedings of the 11th JSME Computational Mechanics Conference, No.98-2, (1998), pp.545-546, in Japanese. abstract
D.Isobe, R.Shimizu, H.Nakamura and Y.Sankai: FEM Optimum Control System of Connected Piezoelectric Actuators, Proceedings of the Conference on Computational Engineering and Science, Vol.4, No.2, (1999), pp.913-916, in Japanese. abstract
D.Isobe, H.Nakamura and R.Shimizu: Development of Real-Time FEM Control System of Connected Piezoelectric Actuators, CD-ROM Proceedings of the JSME Annual Conference on Robotics and Mechatronics '99, No.99-9, (1999), in Japanese. abstract
D.Isobe, H.Nakamura, R.Shimizu and H.Nakagawa: Development of Piezoelectric Actuator Control System Using FEM, Proceedings of the 1st International Conference on Advances in Structural Engineering and Mechanics ASEM'99, Vol.1, (1999), pp.863-868, Seoul, Korea.
D.Isobe, R.Shimizu and H.Nakamura: Development of Quasi-Static FEM Control System of Connected Piezoelectric Actuators, Proceedings of the 12th JSME Computational Mechanics Conference, No.99-5, (1999), pp.307-308, in Japanese. abstract
to HOME![]() to TOP
to TOP![]()