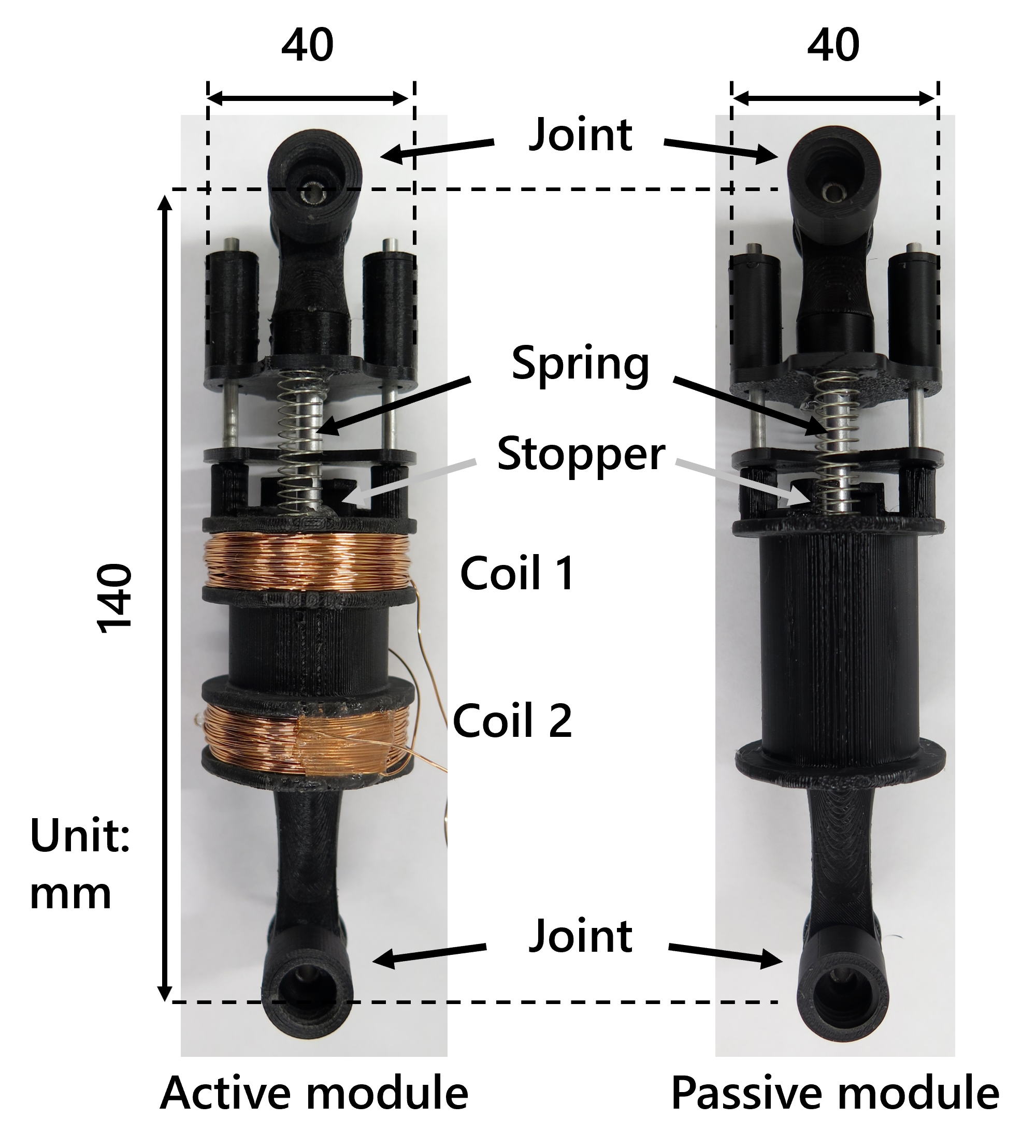
能動型および受動型モジュールの概観
モジュラー型柔軟トラスロボットを制御対象とし,最も単純な有限要素であるトラス要素を使用した有限要素法に基づく逆解析スキームを構築した.続いて,実機の製作および逆解析スキームを用いたフィードフォワード制御系の構築を行った.構築した制御系を複数の形態や外力条件に適用し,有限要素法に基づく制御の有用性を検証した.
能動型および受動型モジュールの概観
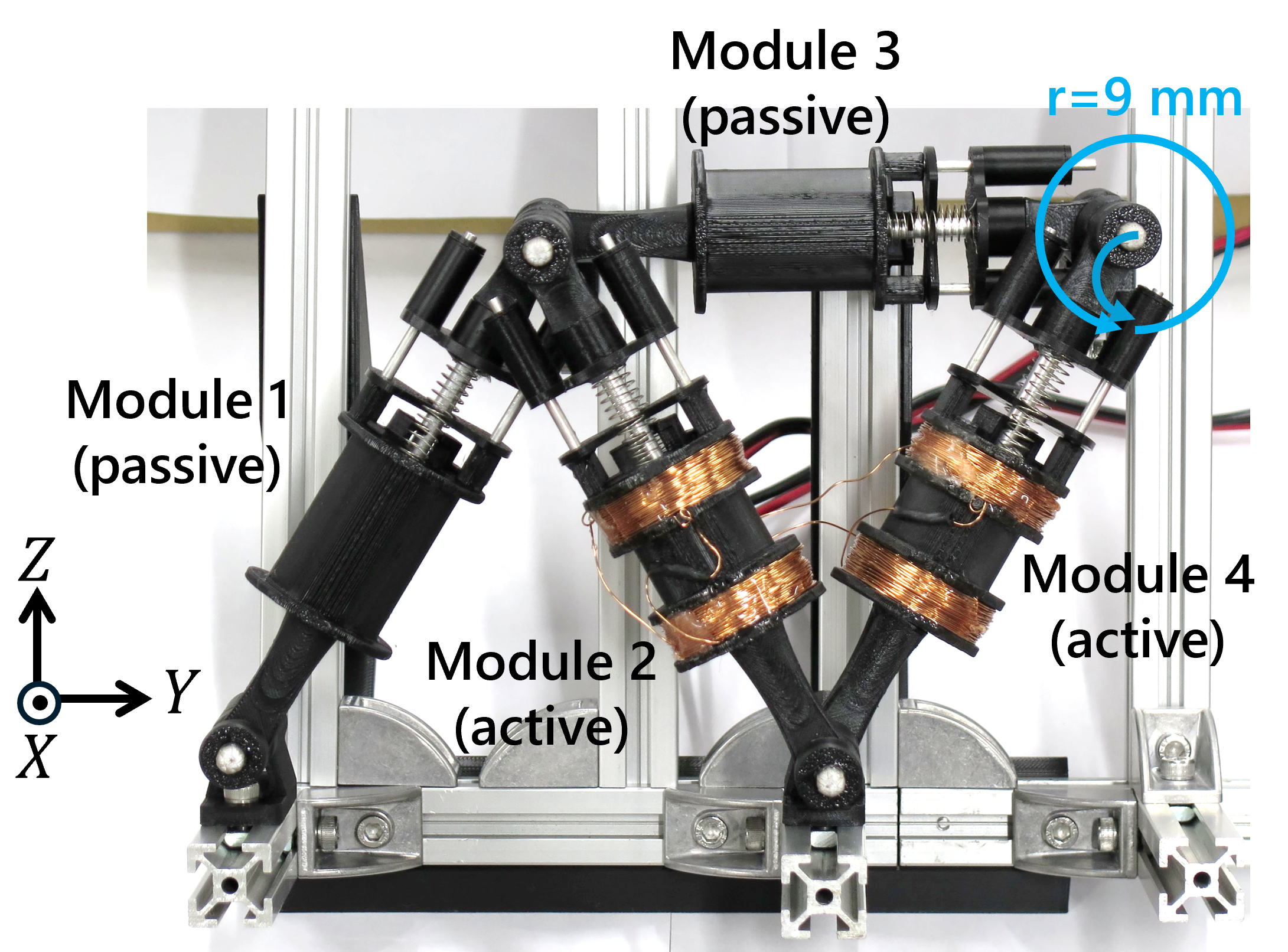
4つのモジュールを組み合わせた柔軟トラスロボット
HOMEへ![]() TOPへ
TOPへ![]()
大場 友暁, 磯部大吾郎: モジュラー型柔軟トラスロボットの有限要素法に基づくフィードフォワード制御,日本機械学会論文集,Vol. 92, No. 955, (2026), p. 25-00171. DOI: 10.1299/transjsme.25-00171
大場友暁,磯部大吾郎: 受動変形を許容するモジュラートラスロボットの開発と有限要素法に基づく制御, 第42回日本ロボット学会学術講演会予稿集, (2024). abstract
HOMEへ![]() TOPへ
TOPへ![]()