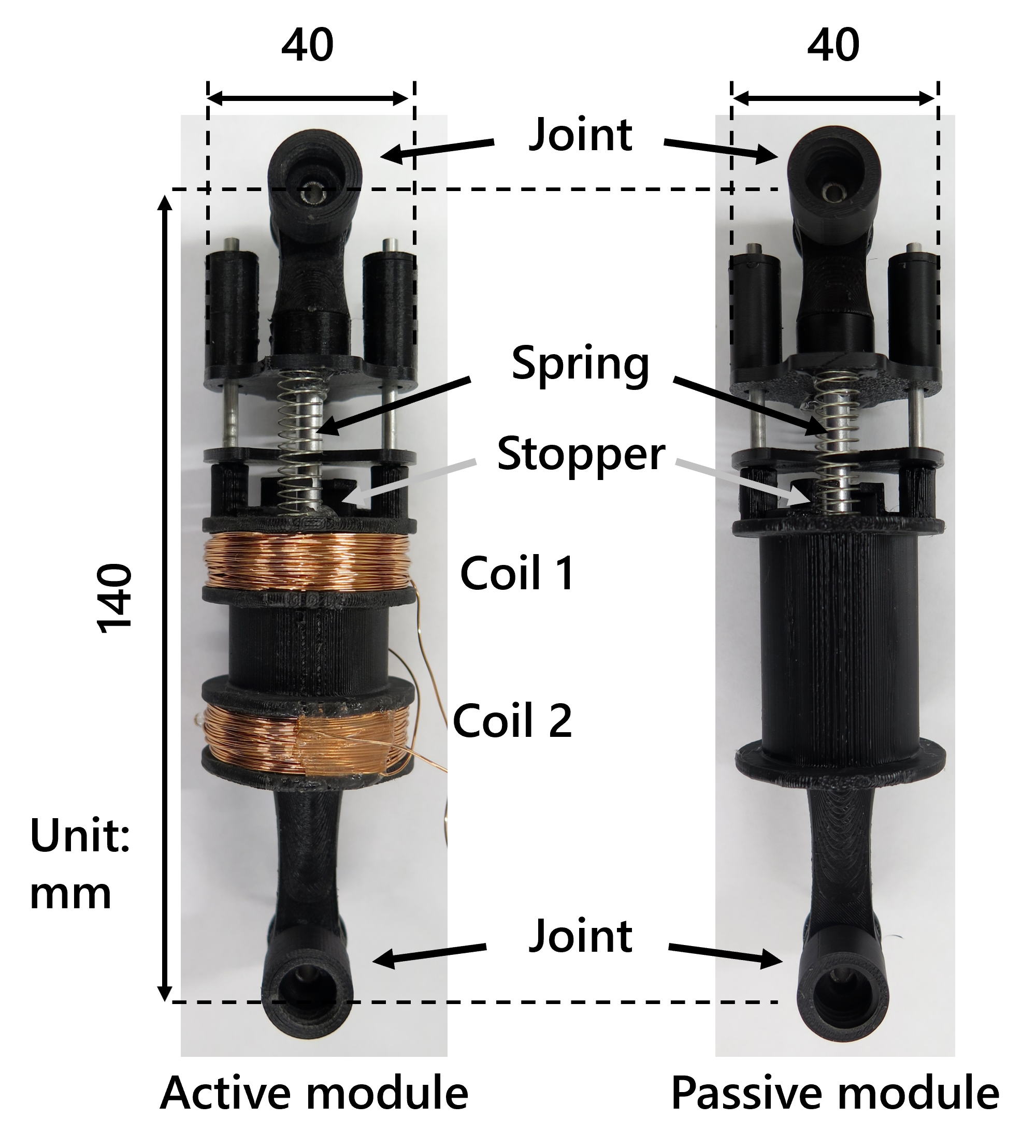
Overview of active and passive modules
We developed an FEM-based inverse analysis scheme using truss elements, along with a modular, deformable truss robot and its feedforward control system. The scheme takes target deformation and external forces as an input and solves a stiffness equation, estimating required actuation forces for each module. Embedded electromagnets and springs provide both passive and active axial movements with modules of the truss robot; the control system first performs inverse analysis and then converts actuation forces into current commands, considering internal and external force effects. Subsequent experiments showed the capability of the control system against simple two- and more complex four-module configurations even under significant self-weight influences. These results highlight the ability of FEM to control MDRs in various configurations and conditions, even without feedback loop, unlocking their full adaptability and functionality.
Overview of active and passive modules
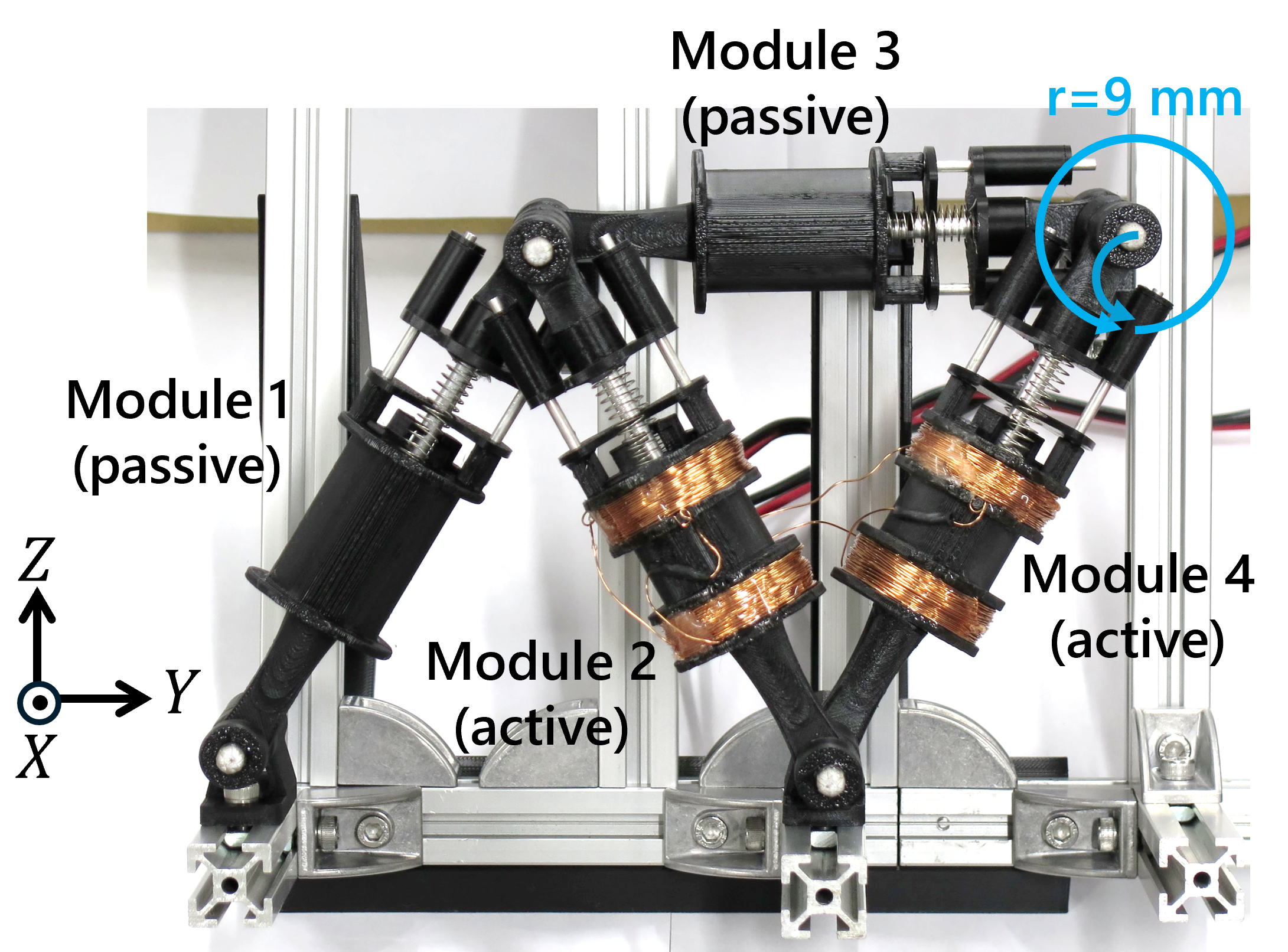
Experimental setup of the four-module robot
to HOME![]() to TOP
to TOP![]()
T. Ohba and D. Isobe: Feedforward control of module-type deformable truss robot based on finite element method, Transactions of the Japan Society of Mechanical Engineers, Vol. 92, No. 955, (2026), p. 25-00171, in Japanese. DOI: 10.1299/transjsme.25-00171
T. Ooba and D. Isobe: Development of a Deformable Modular Truss Robot
to HOME![]() to TOP
to TOP![]()